Jednym z najtrudniejszych wyzwań stojących przed twórcami robotów autonomicznych jest szybkie mapowanie nieznanego obszaru już podczas jego pierwszego przejścia przez niego. Ale takie zadanie z łatwością wykonują na przykład nietoperze, wykorzystując echolokację, czy orientację przestrzenną za pomocą dźwięków.
Echolokacja w przyrodzie jest jedną z najbardziej efektownych, polegającą na odbiciu fal dźwiękowych i ich percepcji przez organizmy żywe. Używają go ryjówki, ćmy, niektóre płetwonogi, a nawet ptaki. Dzięki tym zdolnościom zwierzęta mogą z łatwością poruszać się tam, gdzie jest mało światła słonecznego lub nie ma go wcale.
Teraz, dzięki wysiłkom zespołu izraelskich inżynierów z Uniwersytetu w Tel Awiwie, pod przewodnictwem Itamara Eliakima, echolokacja pomaga nowemu autonomicznemu robotowi podbijać niezbadane przestrzenie. Za podstawę przyjęli zasadę, którą nietoperze wykorzystują w nawigacji. Urządzenie otrzymało odpowiednią nazwę – Robat.
Nietoperze wysyłają sygnał ultradźwiękowy, niesłyszalny dla ludzkiego ucha, i wychwytują echa odbite od przeszkód. Jednocześnie zawsze dokładnie wiedzą, gdzie jest gałąź, gdzie jest owad i gdzie jest pusta ściana. Dotychczasowe próby wykorzystania echolokacji w robotyce ograniczały się do instalacji sonarów – urządzeń technicznych pomagających wykrywać różne obiekty pod wodą. Sprzęt nawigacyjny Robat różni się od dotychczasowych rozwiązań technologicznych i naśladuje cechy biologiczne nietoperzy.
Nowy robot jest wyposażony w głośnik ultradźwiękowy, który emituje sygnały w tym samym zakresie częstotliwości co nietoperze (około 20 do 120 kHz). Dodatkowo urządzenie posiada dwa mikrofony ultradźwiękowe, które symulują uszy zwierząt. Robot porusza się po nieznanym środowisku wykorzystując jedynie odbity sygnał dźwiękowy.
Wyznacza granice obiektów napotykanych na ścieżce i klasyfikuje je za pomocą . W rezultacie w „mózgu” maszyny powstaje szczegółowa mapa otoczenia. Na przykład w jednym z testów robot pomyślnie ustalił, czy na jego drodze znajduje się nieprzekraczalna ściana lub roślina, przez którą może przejść.
Szczegółowy opis obiecującego wynalazku autorzy opublikowali w publikacji PLOS Computational Biology.
Swoją drogą Robat nie jest pierwszym urządzeniem inspirowanym zdolnościami nietoperzy. Wcześniej autorzy projektu Vesti.Nauka (nauka.site) pisali już o tych prezentowanych przez inne zespoły i. To prawda, że urządzenia te nie mogły pochwalić się echolokacją.
Świat zwierząt jest pełen pomysłów, które są szeroko i z powodzeniem stosowane przez specjalistów z dziedziny robotyki. Żywymi tego przykładami są roboty SALTO, Robirds, MuddyBot, WildCat, Octobot i wiele innych niezwykłych urządzeń robotycznych. Niedawno ta seria została uzupełniona o kolejnego członka, Bat Bota, robota-nietoperza stworzonego przez specjalistów z California Institute of Technology i University of Illinois. Miękkie skrzydła tego robota są bezpieczniejszą alternatywą zarówno dla samego robota, jak i dla środowiska, w porównaniu do twardych łopatek quadkopterów i innych samolotów. Po drugie, robot Bat Bot ma wszystkie doskonałe możliwości lotu swojego żywego „prototypu”.
Z sylwetek szybko migających na tle ciemnego nieba nie sposób rozpoznać, że nietoperze dysponują dość skomplikowanym układem mięśniowo-szkieletowym, który pozwala im wykonywać wszystkie elementy „powietrznych akrobacji”. Dzięki obecności wysoce ruchomych stawów w stawach barkowych i łokciowych mysz może dynamicznie zmieniać kształt swoich skrzydeł. Skrzydło nietoperza może przybierać jeden z 40 znanych kształtów, z których każdy ma swoją własną charakterystykę aerodynamiczną, dzięki czemu zwierzę to jest w stanie gwałtownie skręcać w powietrzu i wykonywać strome rzuty w górę lub w dół.
Robot Bat Bot, który waży 93 gramy i ma rozpiętość skrzydeł 0,3 metra, całkowicie kopiuje nawet najmniejsze cechy lotu nietoperzy. Lotem robota sterują skomplikowane algorytmy działające w maleńkim komputerze pokładowym robota, który przy pomocy całego zestawu czujników pozwala robotowi na całkowicie samodzielne latanie.
Tworząc robota Bat Bot, badacze stanęli przed problemem niewystarczającej siły skrzydeł. Mechanizm skrzydła musi być lekki, a jednocześnie trwały, elastyczny i ruchomy, aby podczas wykonywania piruetów w powietrzu umożliwiał bardzo szybką zmianę kształtu skrzydła. Naukowcom udało się jednak osiągnąć zamierzony rezultat, co z kolei zwiększyło nawet efektywność lotu robota w porównaniu z żywym nietoperzem. Podczas lotu najcieńsza membrana skrzydła tworzy rodzaj kieszeni, do której dostaje się „porcja” powietrza, które następnie przy intensywnym ruchu jest wypychane przez skrzydło w pożądanym kierunku, zapewniając większą siłę nośną. Po serii eksperymentów jako najbardziej odpowiedni materiał na membranę skrzydła wybrano najcieńszą warstwę elastycznej gumy silikonowej, której grubość wynosi zaledwie 54 mikrony.
Wysoce zwrotny Bat Bot może dotrzeć do miejsc, do których nie dotrą inne małe statki powietrzne o sztywnych konstrukcjach i sztywnych łopatach śmigieł. Ponadto zastosowanie opłacalnej metody kieszeni powietrznej pozwoli Bat Botowi pozostać znacznie dłużej niż inne samoloty z baterią o porównywalnej pojemności. Wszystko to sprawia, że Bat Bot idealnie sprawdza się w sytuacjach, gdy ostre krawędzie ostrzy innych urządzeń mogłyby zranić ludzi uwięzionych np. w wyniku klęsk żywiołowych lub uszkodzić delikatny i cenny sprzęt.
Kilka dużych firm opracowuje obecnie urządzenia inspirowane biologią (roboty mrówki, motyle, ptaki), w tym niemiecka firma Festo, której głównym obszarem działalności jest automatyka przemysłowa.
Najnowszym osiągnięciem niemieckich inżynierów w tym kierunku jest sterowany robot BionicFlyingFox. W odróżnieniu od innych modeli powtarza budowę ciała nietoperza owocożernego – największego podgatunku nietoperzy. Według twórców urządzenie należy do kategorii „ultralekkich urządzeń latających z inteligentną kinematyką”, co daje mu nieosiągalne wcześniej możliwości.
Jakie cechy ma latający robot?
Przedstawiciele firmy uchylili zasłonę tajemnicy, publikując główne parametry nowego produktu:
- rozpiętość skrzydeł – 228 cm;
- długość – 87 cm;
- waga – 580 gramów.
Aby kij był tak lekki, membrana skrzydła została wykonana z cienkiej tkaniny, która jest pokryta z obu stron dwiema warstwami nieprzepuszczającej powietrza folii.

Cechy konstrukcyjne robota-nietoperza
Oprócz materiału membrany warto zwrócić uwagę na samo skrzydło: składa się ono z dwóch połączonych ze sobą płaszczyzn. Każdy samolot ma własne silniki i pętlę sterującą. Siłą napędową jest główny silnik prądu stałego. Silnik główny i silniki pomocnicze zasilane są energią z wbudowanego zasilacza, co zapewnia urządzeniu pełną autonomię.
Sterowanie odbywa się za pomocą naziemnej stacji kontroli, która poprzez wbudowane kamery jest w stanie monitorować działania jednostki w powietrzu. Aby uprościć proces obsługi, twórcy wprowadzili system sztucznej inteligencji i samouczenia się. Funkcja ta pozwala na doskonalenie techniki wykonywania manewrów powietrznych. W przyszłości technika ta zostanie doprowadzona do perfekcji, a roboty-zwierzęta nie będą już ustępować w swoich możliwościach żywym prototypom.
Zdolność nietoperzy do latania w niemal całkowitych ciemnościach i wykonywania skomplikowanych manewrów od setek lat zaskakuje i intryguje naukowców. Dopiero stosunkowo niedawno eksperci odkryli, w jaki sposób nietoperz może poruszać się w przestrzeni kosmicznej bez pomocy narządów wzroku. Jednak eksperci podziwiają nie tylko zdolności nawigacyjne tych zwierząt, ale także ich umiejętności lotu.
Mysz leci cicho, szybko i niemal natychmiast potrafi zmienić kierunek ruchu. Gdyby coś takiego udało się stworzyć człowiekowi, dałoby to wiele nauce i technologii. Inżynierowie i naukowcy od dawna badają mechanikę lotu tych zwierząt, próbując odtworzyć mechanizm lotu myszy. Niektórym się to udaje.
Niedawno naukowcy z Caltech zaprezentowali swojego robota Bat Bot (B2), wyposażonego w miękkie kompozytowe skrzydła z membranami pomiędzy ramą. Partnerami Caltech w projekcie był zespół specjalistów z University of Illinois w Urbana-Champaign (UIUC, University of Illinois at Urbana-Champaign). „Konstrukcja tego robota pomoże nam budować wydajniejsze i bezpieczniejsze drony, a także pomoże nam dowiedzieć się, jak latają nietoperze” – powiedziała Soon-Jo Chung, jedna ze współpracowników projektu.
Chung, który dołączył do zespołu Caltech, opracował robota-nietoperza wraz ze swoim byłym doradcą ds. badań Alirezą Ramezani i Sethem Hutchinsonem, profesorem na Uniwersytecie Illinois w Urbana-Champaign.
Robot waży zaledwie 93 gramy. Zewnętrznie przypomina nietoperza, na obraz i podobieństwo, na który został zaprojektowany. Rozpiętość skrzydeł wynosi zaledwie 30 centymetrów. Podczas lotu system może zmieniać kształt skrzydeł poprzez złożenie lub rozłożenie „palców”, zmieniając kształt i położenie nadgarstków, nóg i ramion. Eksperci uważają, że nietoperz jest jednym z najbardziej (jeśli nie najbardziej) skomplikowanych zwierząt zdolnych do lotu. Skrzydła nietoperza mogą zmieniać kształt, a mechanizm lotu obejmuje wykorzystanie kilku rodzajów stawów, które mogą mocować kości i mięśnie lub odwrotnie, zwiększać swobodę kości tworzących skrzydło.
Zasada lotu chiroptera znacznie różni się od zasady lotu ptaków. Główną cechą jest elastyczność i giętkość skrzydła chiroptera. Silne ugięcie skrzydła podczas jego ruchu w dół zapewnia znacznie większą siłę nośną i zmniejsza koszty energii w porównaniu do ptaków. Podczas lotu, gdy skrzydło porusza się w dół, na jego krawędzi natarcia tworzy się wir powietrza, który według naukowców odpowiada za aż 40% siły nośnej skrzydła. Strumień powietrza rozpoczyna się na krawędzi natarcia skrzydła, następnie omija ją i powraca ponownie podczas ruchu skrzydła w górę. Wszystko to stało się możliwe dzięki elastyczności skrzydła, którego wygięcie pozwala na utrzymanie turbulencji blisko powierzchni skrzydła.

Aby robot mógł latać, twórcy stworzyli złożony system sprzętu i oprogramowania. Dane środowiskowe zbierane przez drona podczas lotu przetwarzane są w czasie rzeczywistym. Oprogramowanie sterujące odbiera te dane i koordynuje pracę drona. Wszystko to działa autonomicznie, bez udziału operatora
Układ mięśniowo-szkieletowy skrzydeł nietoperza może wykonać ponad 40 ruchów w różnych kierunkach. „Rezultatem naszej pracy jest jeden z najbardziej zaawansowanych jak dotąd projektów skrzydeł robota, uwzględniający morfologię nietoperza, który może latać autonomicznie” – powiedział Ramezani. Oczywiście temu robotowi daleko jeszcze do prawdziwego nietoperza, który potrafi dogonić owada w powietrzu, okrążyć go, złapać i zjeść. Taka zwrotność to kwestia przyszłości, choć całkiem niedaleka.
Rzeczywiście skrzydła robota mogą zmieniać kształt w taki sam sposób, jak robią to właściciele „prototypów”. Wykonanie skrzydła tego typu jest dość trudne, aby to zrobić, musisz dobrze zrozumieć cechy anatomiczne budowy układu mięśniowo-szkieletowego nietoperzy. Jako materiał alternatywny dla skóry inżynierowie stworzyli folię o grubości zaledwie 56 mikronów, bazującą na silikonie. Materiał ten rozciąga się i kurczy niemal tak dobrze, jak skóra pokrywająca skrzydła nietoperzy.
Zdaniem twórców latające roboty-nietoperze mogą być znacznie bardziej energooszczędne niż konwencjonalne maszyny latające. Roboty tego typu mogą być stosowane jako alternatywa dla dronów. Co więcej, w przeciwieństwie do większości dronów, sztuczne nietoperze będą mogły szybciej zmieniać kierunek lotu. Poza tym nie będą tak niebezpieczne dla ludzi (pod względem możliwości odniesienia obrażeń) jak te same helikoptery.
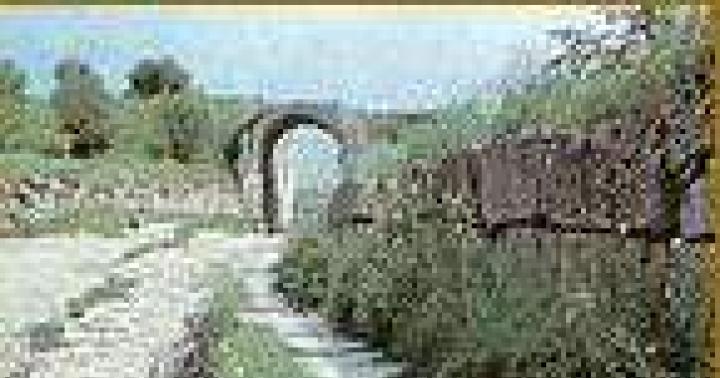
Grupa robotyki i cybernetyki z Politechniki w Madrycie (Hiszpania) zaprezentowała nowy mikro-UAV. W dronie zastosowano innowacyjny system sztucznych mięśni, składający się z materiałów, które mogą kurczyć się i kurczyć w podobny sposób jak mięśnie nietoperzy.
Jak dotąd sztuczna mysz leci tylko po linii prostej, a drgania jej skrzydeł nie przekraczają 4 mm. (Tutaj i poniżej znajdują się zdjęcia Politechniki w Madrycie.)
Mowa o dronie BaTboT, czyli „Latającej Myszy Robocie”. Podaje się, że miniaturowe urządzenie, którego kształt skrzydeł można zmieniać bezpośrednio w locie, jest w stanie bardzo skutecznie manewrować przy małych prędkościach, co pozwoli mu latać w ograniczonej przestrzeni lub wśród licznych przeszkód.
Skrzydła nietoperzy (jedynych ssaków zdolnych do lotu) składają się z ponad dwudziestu niezależnych stawów i jednej cienkiej, elastycznej membrany rozciągniętej w poprzek układu kostnego skrzydła. Niesamowita manewrowość zwierząt jest wynikiem połączenia trzepotania ich skrzydeł z jednoczesnym kurczeniem się i rozciąganiem tych samych skrzydeł w locie. Skrzydło o tak zmiennej geometrii było udoskonalane przez ewolucję na przestrzeni milionów lat, a próba jego odtworzenia w krótkim czasie stała się dla naukowców nie lada wyzwaniem. Zaakceptowali to i w rezultacie powstał BaTboT.
Rozpiętość skrzydeł tego mikro-BSP wynosi 50 cm, co tłumaczy się chęcią „odpowiadania naturalnemu prototypowi”. Prototypem był latający lis (Pteropus poliocephalus), jeden z największych nietoperzy na świecie. Masa mikro-UAV została zminimalizowana, aby osiągnąć maksymalny czas lotu na wbudowanym akumulatorze litowo-polimerowym.
Aby odtworzyć funkcjonowanie układu mięśniowego zwierzęcia, badacze musieli podjąć się stosunkowo złożonego zadania – zamiast konwencjonalnych silników musieli imitować działanie mięśni istot żywych. „Mięśnie” BaTboT są zbudowane z maleńkich włókien „utkanych” ze stopów z pamięcią kształtu; działają w taki sam sposób, jak biceps i triceps, napinając stawy skrzydła nietoperza. Każdy z „mięśni” BaTboT waży niecałe 1 g, a całkowita masa mikro-BSP, którego twórcy wolą nazywać latającym robotem, wynosi 125 g (łącznie z akumulatorami, elektroniką pokładową i napędem). „Szkielet” ciągnie z siłą 34 g. Całkowity ciąg skrzydła lotnika wynosi 12,2 g/cm, czas trzepotania wynosi 300 ms, oscylacja skrzydła podczas trzepotania wynosi około 4 mm. Prąd poruszający „mięśnie” ma siłę 285 mA i napięcie 3–5 V.
Rama mikro UAV. Naciągnięta jest na nią silikonowa tkanina osłonowa o grubości 0,1 mm.
Dane na temat biologicznych szczegółów lotu nietoperzy uzyskali hiszpańscy badacze od kolegów z Brown University w Providence (USA). W najbliższej przyszłości, oprócz prostego lotu prostego, autorzy zamierzają przejść do lotów z intensywnym manewrowaniem, co pozwoli nam udoskonalić systemy sterowania, nawigacji i czujników. Celem tej modyfikacji jest osiągnięcie możliwości wykonywania autonomicznych działań, podczas których mikrodron będzie mógł zbierać informacje. Jako możliwe zastosowania naukowcy wymieniają badania biologiczne nad nietoperzami w ich naturalnym środowisku oraz zwalczanie szkodników.
Nie ma wątpliwości, że zdolność gromadzenia informacji i wysoce zwrotny lot w zamkniętych przestrzeniach nie będą interesujące dla wojska. Przypomnijmy, że podczas II wojny światowej Siły Powietrzne Stanów Zjednoczonych pracowały nad projektem bombardowania japońskich miast nietoperzami wrzucanymi do samorozpakowujących się pojemników, przy czym każda mysz miała w plecaku 17-gramową bombę zapalającą. Loty testowe wypadły na tyle pomyślnie, że sama baza testowa niemal spłonęła...
Ostateczna publikacja pierwszego etapu projektu powinna nastąpić jeszcze w tym roku.