Шаговые двигатели интересны тем, что позволяют повернуть вал на определённый угол. Соответственно, с их помощью можно повернуть вал и на определённое число оборотов, потому что N оборотов — это тоже определённый угол, равный 360*N, и, в том числе, на нецелое число оборотов, например на 0.75 оборота, 2.5 оборота, на 3.7 оборота и т.д. Этими возможностями шаговых двигателей определяется и область их применения. В основном они используются для позиционирования различных устройств: считывающих головок в дисководах, печатающих головок в принтерах и плоттерах и т.д.
Естественно такие возможности не могли обойти стороной и радиолюбители. Они с успехом используют шаговики в конструкциях самодельных роботов, самодельных станков с ЧПУ и т.д. Ниже описаны результаты моих опытов с шаговым двигателем, надеюсь, что кому-то это может оказаться полезным.
Итак, что нам понадобится для экспериментов. Во-первых, шаговый двигатель. Я брал 5-ти вольтовый китайский биполярный шаговик с загадочным названием, выдранный из старого 3,5" дисковода, аналог M20SP-GW15. Во-вторых, поскольку обмотки двигателя потребляют значительный ток (в данном случае до 300 мА), то вполне понятно, что подключить шаговик к контроллеру напрямую не удастся, нужен драйвер.
В качестве драйвера для биполярных шаговых двигателей обычно используют схему так называемого H-моста или специальную микросхему (в которой всё равно встроен H-мост). Можно конечно ваять самому, но я взял готовую микруху (LB1838) из того же старого дисковода. Собственно, кроме всего вышеописанного, для наших экспериментов также понадобятся: PIC-контроллер (был взят PIC12F629, как самый дешёвый) и пара кнопок.
Перед тем, как перейти непосредственно к схеме, давайте немного разберёмся с теорией.
Биполярный шаговый двигатель имеет две обмотки и, соответственно, подключается по четырём проводам. Найти концы обмоток можно простой прозвонкой — концы проводов, относящиеся к одной обмотке, будут между собой звониться, а концы, относящиеся к разным обмоткам, — нет. Концы первой обмотки обозначим буквами "a", "b", а концы второй обмотки буквами "c", "d".
На рассматриваемом экземпляре есть цифровая маркировка контактов возле мотора и цветовая маркировка проводов (бог его знает, может это тоже какой-то стандарт): 1 — красный, 2 — голубой — первая обмотка; 3 — жёлтый, 4 — белый — вторая обмотка.
Для того, чтобы биполярный шаговый двигатель вращался, необходимо запитывать обмотки в порядке, указанном в таблице. Если направление обхода таблицы выбрать сверху вниз по кругу, то двигатель будет вращаться вперёд, если снизу вверх по кругу — двигатель будет вращаться назад:
За один полный цикл двигатель делает четыре шага.
Для правильной работы, должна строго соблюдаться указанная в таблице последовательность коммутаций. То есть, например, после второй комбинации (когда мы подали + на вывод "c" и минус на вывод "d") мы можем подать либо третью комбинацию (отключить вторую обмотку, а на первой подать — на "a" и + на "b"), тогда двигатель повернётся на один шаг вперёд, либо первую комбинацию (двигатель повернётся на один шаг назад).
То, с какой комбинации нужно начинать вращение, определяется тем, какая последняя комбинация подавалась на двигатель перед его выключением (если конечно его руками потом не крутили) и желаемым направлением вращения.
То есть, допустим мы повернули двигатель на 5 шагов вперёд, подавая на него комбинации 2-3-4-1-2, потом обесточили, а потом захотели повернуть ещё на один шаг вперёд. Для этого на обмотки надо подать комбинацию 3. Пусть после этого мы его опять обесточили, а через какое-то время захотели вернуть его на 2 шага назад, тогда нам нужно подать на двигатель комбинации 2-1. И так далее в таком же духе.
Эта таблица, кроме всего прочего, позволяет оценить, что будет происходить с шаговым двигателем, если мы перепутаем порядок подключения обмоток или концы в обмотках.
На этом мы закончим с двигателем и перейдём к драйверу LB1838.
У этой микрухи есть четыре управляющие ноги (IN1, IN2, EN1, EN2), на которые мы как раз и будем подавать сигналы с контроллера, и четыре выходных ноги (Out1, Out2, Out3, Out4), к которым подключаются обмотки двигателя. Обмотки подключаются следующим образом: провод "a" подключается к Out1, провод "b" — к Out2, провод "c" — к Out3, провод "d" — к Out4.
Ниже представлена таблица истинности для микросхемы драйвера (состояние выходов в зависимости от состояния входов):
| IN1 | EN1 | Out1 (a) | Out2(b) | IN2 | EN2 | Out3(c) | Out4(d) |
| Low | High | + | — | Low | High | + | — |
| High | High | — | + | High | High | — | + |
| X | Low | откл | откл | X | Low | откл | откл |
Теперь давайте нарисуем на диаграмме, какую форму должны иметь сигналы IN1, EN1, IN2, EN2 для одного полного цикла вращения (4 шага), т.е. чтобы на выходах появились последовательно все 4 комбинации подключения обмоток:

Если присмотреться к этой диаграмме (слева), то становится очевидно, что сигналы IN1 и IN2 можно сделать абсолютно одинаковыми, то есть на обе этих ноги можно подавать один и тот же сигнал. В этом случае наша диаграмма будет выглядеть так:

Итак, на последней диаграмме нарисовано, какие комбинации уровней сигналов должны быть на управляющих входах драйвера (EN1, EN2, IN1, IN2) для того, чтобы получить соответствующие комбинации подключения обмоток двигателя, а также стрелками указан порядок смены этих комбинаций для обеспечения вращения в нужную сторону.
Вот в общем-то и вся теория. Необходимые комбинации уровней на управляющих входах формируются контроллером (мы будем использовать PIC12F629).
Схема :
Готовый девайс :


Программа управления реализует следующий алгоритм: при нажатии кнопки КН1 двигатель поворачивается на один шаг в одну сторону, а при нажатии кнопки КН2 — на один шаг в другую сторону.
Собственно говоря, можно прикрутить сюда и реализовать управление от компьютера (передавать с компа скорость, количество шагов и направление вращения).
Драйвер шагового двигателя на транзисторах
Представляю Вашему вниманию драйвер биполярного шагового двигателя на биполярных транзисторах серии «КТ».
Драйвер работает по принципу эмиттерного повторителя. Сигнал управления поступает на каскад усиления собранного на транзисторе кт315. После чего попадет на Н мост из комплементарной пары КТ815 и КТ 814.
Каскад усиления необходим, так как мощности тока на выходе из микроконтроллера недостаточно для  открытия силовых транзисторов. После силовых транзисторов установлены диоды гашения самоиндукции мотора.
открытия силовых транзисторов. После силовых транзисторов установлены диоды гашения самоиндукции мотора.
Так же в схеме предусмотрено гашение помех в виде конденсаторов на 3 на 0,1 мкф и 1 на 100 мкф. Так как драйвер проектировался для работы с двигателем от CD привода на 150 ватт, охлаждение на транзисторах не

Шаговый двигатель из CD привода подключенный к драйверу на транзисторах
устанавливалось, но максимальный ток эмиттера транзисторов КТ814 и КТ815 составляет 1,5 а, благодаря чему данным драйвером можно крутить моторы и по мощнее. Для этого всего необходимо установить пластины охлаждения на силовые транзисторы.
Рассмотрим драйвер электродвигателей на транзисторах и микросхеме L298, разберемся с принципом работы H-моста. Узнаем особенности подключения драйверов на L298 к разным двигателям и источникам питания, проведем простые эксперименты с шаговыми движками и двигателями постоянного напряжения. Подключение к Raspberry Pi и простейшие программы для теста управления драйвером.
Что такое H-мост
При проектировании станков, роботов и других автоматизированных устройств возникает необходимость управлять электродвигателем постоянного тока или же катушками шагового движка. Для того, чтобы иметь возможность управлять обмоткой двигателя и заставить его вал вращаться в разные стороны, необходимо выполнять коммутацию с переполюсовкой. Для подобной цели используется так называемый "H-мост".
Почему такое название? - потому что схема включения двигателя и переключателей для коммутации напоминает латинскую букву H. Принципы работы H-моста показан нарисунке ниже.
Рис. 1. Как работает H-мост, принцип коммутации двигателя для вращения в разные стороны.
Как видим, при помощи 4х переключателей мы можем подключать мотор к источнику питания в разной полярности, что в свою очередь заставит вращаться его вал в разные стороны. Переключатели можно заменить на реле, или же на мощные электронные ключи на транзисторах.
Важно заметить что НЕЛЬЗЯ допускать замыкания двух ключей на одной стороне H-моста, поскольку получится короткое замыкание, при проектировании схемы моста нужно заложить это правило в логику и таким образом реализовать защиту.
Схема простого H-моста на кремниевых транзисторах
Собрать простой драйвер двигателя постоянного тока (или для обмотки шагового двигателя) можно на распространенных кремниевых транзисторах.
![]()
Рис. 2. Принципиальная схема простого драйвера электродвигателя на кремниевых транзисторах.
Такой драйвер позволяет управлять электродвигателем постоянного тока с питающим напряжением до 25В (для КТ817А, КТ816А) и до 45В (для КТ817Б-Г, КТ816Б-Г) с током не более 3А. При большом рабочем и нагрузочном токе двигателя выходные транзисторы КТ817 и КТ816 должны быть установлены на радиаторы достаточного размера.
Установка диодов VD1-VD2 обязательна, они нужны для защиты выходных транзисторов от обратного тока. На их место можно поставить отечественные КД105А или другие на больший ток.
Собрав две такие схемки (2х6 транзисторов) можно также управлять шаговым двигателем или же двумя двигателями постоянного тока.
Для того чтобы не городить огород из 12 транзисторов можно применить специализированные микросхемы, ниже мы рассмотрим пример с микросхемой L298 и готовым блоком на ее основе.
Микросхема L298, характеристики и возможности
Интегральная микросхема L298 - это мощный универсальный мостовой драйвер для управления двигателями постоянного тока, шаговыми движками, электромагнитными реле и электромагнитами (соленоидами). В микросхеме содержится два H-моста, выполненных на мощных транзисторах, а также логика совместимая с TTL.

Рис. 3. Микросхема L298 в корпусах Multiwatt15 PowerSO20.
Основные технические характеристики:
- Рабочее напряжение - до 46В;
- Максимальный постоянный ток - 4А (с радиатором);
- Низкое напряжение насыщения;
- Защита от перегрева;
- Логический "0" = напряжение до 1,5В.
Где можно применить драйвер на микросхеме L298? - несколько идей:
- Управление шаговым двигателем;
- Управление двумя двигателями постоянного тока (DC motors);
- Коммутация катушек мощных реле;
- Управление соленоидами (электромагнитами).
Если посмотреть на структурную схему микросхему L298 то мы можем увидеть что-то на подобии схемы на рисунке 2, только с дополнительными логическими элементами.

Рис. 4. Внутренняя схема микросхемы L298N - мощный двойной H-мост.
Для каждого H-моста мы имеем по 3 входа: In1 - для подачи напряжения в одном направлении, In2 - в противоположном, и еще один вход En для подачи питания на выходные транзисторы моста.
Таким образом мы можем установить направление прохождения тока и управлять его подачей (включено или выключено, а также ШИМ).
Схема драйвера на микросхеме L298
Ниже представлена простая схема для драйвера двигателей на микросхеме L298N. Управление осуществляется по четырем проводам (вместо шести у L298) благодаря использованию дополнительных инверторов в микросхеме CD4011.

Рис. 5. Принципиальная схема драйвера электродвигателей на микросхеме L298N.
Для питания логики обеих микросхем нужно стабилизированное напряжение +5В (P2), можно использовать интегральный стабилизатор, например L7805 или же питать логику от имеющейся линии питания +5В. Для подачи питающего напряжения на двигатели используется отдельная линия питания P1.
Выводы P4, P5 используются для установки полярности каждого из каналов, а выводы P6, P7 - разрешают подачу питания на каскады (ключи) внутреннего H-моста для каждого канала.
Микросхему CD4011 можно заменить на отечественную К176ЛА7. Диоды Шоттки можно поставить другого номинала, на 35В/4А и более. Если не планируется ограничивать ток обмоток двигателя(двигателей) то низкоомные ограничивающие резисторы R9-R10 можно исключить из схемы, заменив их на перемычки.
В интернете можно заказать готовый модуль на L298, правда в нем будет 6 входов для управления.

Рис. 6. Готовые модули на L298.
Я для своих нужд приобрел готовый модуль по типу как на рисунке слева. В нем присутствует микросхема L298 и небольшой стабилизатор для подачи +5В на логику микросхемы.
Для подключения данной платки важно четко уяснить одну особенность:
- Если для питания двигателей используется напряжение более чем 12В то перемычку нужно убрать и подавать отдельно 5В на выделенный для этого коннектор
- Если питание двигателей будет осуществляться от напряжения 5-12В то перемычку нужно утсановить и дополнительное питание 5В не понадобится.
Если же подать на двигатели, например 20В и оставить перемычку установленной, то на модуле выгорит микросхемка-стабилизатор на 5В. Почему разработчики не установили интегральный стабилизатор с более широким диапазоном входных напряжений - не понятно.
Для того чтобы сэкономить два входа при подключении такого блока к Arduino или Raspberry Pi можно добавить часть схемы на CD4001, как на рисунке 5.
L298 + DC двигатели + Raspberry Pi
Для данного эксперимента к модулю на L298 были подключены два двигателя постоянного тока. Питание всего модуля осуществляется от одного аккумулятора на 6В. Поскольку это напряжение меньше 12В (смотрим выше описание) то перемычку внутреннего стабилизатора оставляем установленной и дополнительное питание +5В для логики не потребуется.
Перемычки "ENA" и "ENB", которые разрешают подачу питания на выходные мосты, оставлены установленными. Таким образом, для управления каждым из двигателей используем оставшиеся четыре входа: IN1, IN2, IN3, IN4.
После подключения питания на модуле загорится светодиод, теперь можем подать на каждый из входов поочередно +5В и посмотреть как будут вращаться наши движки.
Где взять +5В? - в данном случае это напряжение присутствует на разъеме питания, справа возле GND. Для теста можно воспользоваться кусочком проволоки - перемычкой.
Теперь подключим наш модуль к Raspberry Pi и напишем простую тестовую программу на Python. Для подключения модуля я использовал выводы GPIO вот в таком соответствии:

Рис. 7. L298 + Raspberry Pi + электродвигатели постоянного тока.
Мини-компьютер у меня питается через понижающий импульсный стабилизатор от второго аккумулятора на 6В. Перейдем к написанию программы для нашего эксперимента, наша цель - управлять вращением вала каждого из двигателей при помощи клавиатуры, которая подключена к Raspberry Pi или же удаленно по SSH, VNC.
Теперь испробуем простую программу, написанную на Python, которая поможет понять принцип управления электродвигателем постоянного тока.
Загружаем малинку, открываем Терминал или же подключаемся к ней удаленно при помощи SSH. Создаем новый файл и открываем его для редактирования при помощи команды:
Nano /home/pi/l298_dc_motors_test.py
Вставляем в редактор код скрипта на Python, который приведен ниже:
#!/usr/bin/env python # -*- coding: utf-8 -*- import time import RPi.GPIO as GPIO # Подготавливаем пины GPIO. GPIO.cleanup() GPIO.setmode(GPIO.BCM) GPIO.setup(4, GPIO.OUT) GPIO.output(4, GPIO.LOW) GPIO.setup(17, GPIO.OUT) GPIO.output(17, GPIO.LOW) # Включаем вращение двигателя 1 в одну сторону. GPIO.output(4, GPIO.HIGH) # ждем 5 секунд. time.sleep(5) # Выключаем двигатель 1. GPIO.output(4, GPIO.LOW) # ждем 10 секунд. time.sleep(10) # Включаем вращение двигателя 1 в другую сторону. GPIO.output(17, GPIO.HIGH) # ждем 5 секунд. time.sleep(5) # Выключаем двигатель 1. GPIO.output(17, GPIO.LOW)
Выходим из редактора и сохраняем файл. Делаем скрипт исполняемым и запускаем его:
Chmod +x /home/pi/l298_dc_motors_test.py /home/pi/l298_dc_motors_test.py
После запуска скрипта один из двигателей начнет вращаться в одну сторону на протяжении пяти секунд, потом он выключится и через 10 секунд начнет вращаться в другую сторону на протяжении 5-ти секунд.
Ниже приведен более сложный и функциональный пример программы, которая будет взаимодействовать с пользователем и позволит интерактивно управлять двумя электродвигателями. Аналогично первому скрипту, программу можно сохранить в тот же файл или в новый отдельно созданный.
Важно чтобы в данном примере кода соблюдались отступы, об этом я уже писал раньше .
#!/usr/bin/env python # -*- coding: utf-8 -*- import os import sys import curses import time import RPi.GPIO as GPIO # Установим номера пинов GPIO, с которыми будем работать M1_RIGHT = 4 M1_LEFT = 17 M2_RIGHT = 27 M2_LEFT = 22 # Функция для подготовки пинов GPIO def setup(*ports): GPIO.cleanup() # Режим именования пинов по названию, а не по номеру на плате GPIO.setmode(GPIO.BCM) for port in ports: # Установка пина на вывод + низкий уровень "0" GPIO.setup(port, GPIO.OUT) GPIO.output(port, GPIO.LOW) # Функция для установки низкого уровня на всех пинах (выключение) def stop_all(): GPIO.output(M1_LEFT, GPIO.LOW) GPIO.output(M1_RIGHT, GPIO.LOW) GPIO.output(M2_LEFT, GPIO.LOW) GPIO.output(M2_RIGHT, GPIO.LOW) # Функция для управления вращением движков def rotate(motor=1, mode="s"): # Выключаем все пины stop_all() # Для мотора 1 if motor == 1: if mode == "r": # Устанавливаем высокий уровень на пине M1_RIGHT (4) GPIO.output(M1_RIGHT, GPIO.HIGH) elif mode == "l": # Устанавливаем высокий уровень на пине M1_LEFT (17) GPIO.output(M1_LEFT, GPIO.HIGH) # Для мотора 2 elif motor == 2: if mode == "r": GPIO.output(M2_RIGHT, GPIO.HIGH) elif mode == "l": GPIO.output(M2_LEFT, GPIO.HIGH) # Выполним инициализацию пинов GPIO setup(M1_RIGHT, M1_LEFT, M2_RIGHT, M2_LEFT) # Инициализация экрана (модуль curses) stdscr = curses.initscr() # Реагировать на нажатие клавиш без подтверждения при помощи ENTER curses.cbreak() # Разрешить использование стрелочек на клавиатуре stdscr.keypad(1) # Не блокировать программу по времени при опросе событий stdscr.nodelay(1) # Отобразим на экране данные по умолчанию stdscr.addstr(0, 10, "Hit "q" to quit") stdscr.addstr(2, 10, "A - M1 Left, D - M1 Right") stdscr.addstr(3, 10, "< - M2 Left, > - M2 Right") stdscr.addstr(4, 10, "S - stop") stdscr.refresh() # Главный цикл while True: # Получаем код нажатия клавиши и проверяем его key = stdscr.getch() if key != -1: # Если клавиша "стрелка влево" то вращаем движок 2 влево if key == curses.KEY_LEFT: # Выводим на экран строку "M2 <---" в позиции 6, 10 stdscr.addstr(6, 10, "M2 <---") rotate(2, "l") # Если клавиша "стрелка вправо" то вращаем движок 2 вправо elif key == curses.KEY_RIGHT: stdscr.addstr(6, 10, "M2 --->") rotate(2, "r") # Если клавиша "а" то вращаем движок 1 влево elif key == ord("a"): stdscr.addstr(6, 10, "M1 <---") rotate(1, "l") # Если клавиша "d" то вращаем движок 1 вправо elif key == ord("d"): stdscr.addstr(6, 10, "M1 --->") rotate(1, "r") # Если клавиша "s" то останов всех движков elif key == ord("s"): stdscr.addstr(6, 10, "STOP 12") stop_all() # Если клавиша "s" то выходим из программы elif key == ord("q"): # Восстановление прежних настроек терминала stdscr.keypad(0) curses.echo() curses.endwin() # Очистка и выход os.system("clear") sys.exit() # Обновляем текст на экране и делаем небольшую задержку stdscr.refresh() time.sleep(0.01)
Запустив скрипт можно понажимать стрелочки клавиатуры "влево" и "вправо", а также клавиши с буквами "A" и "D" - двигатели должны вращаться поочередно и в разные стороны, а программа будет отображать их текущий режим работы.
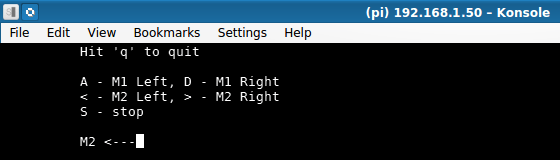
Рис. 8. Программа на Python для управления двигателями при помощи драйвера L298 (терминал Konsole, KDE).
Краткая видео-демонстрация работы данного эксперимента приведена ниже:
Что такое шаговый двигатель, типы шаговиков
Шаговый двигатель (для тех кто не знает) - это электромотор, в котором нет щеток и обмоток на статоре (якоре), они присутствуют на роторе и размещены таким образом что подключая каждую из них к источнику питания мы выполняем фиксацию ротора (делаем один шаг). Если поочередно подавать напряжение на каждую из обмоток с нужной полярностью то можно заставить двигатель вращаться (делать последовательные шаги) в нужном направлении.
Шаговые двигатели надежны, стойки к износу и позволяют контролировать вращение на определенный угол, применяются в автоматизации процессов, на производстве, в электронно-вычислительной аппаратуре(CD-DVD приводы, принтеры, копиры) и т.п.
Такие двигатели бывают следующих видов:
- Биполярный - 2 обмотки, по одной на каждую фазу, для управления можно использовать схему на 2 H-моста или один полу-мост с двуполярным питанием;
- Униполярный - 2 обмотки, каждая с отводом от середины, удобно переключать фазы сменой половинок каждой из обмоток, упрощает схему драйвера (4 ключа), а также использовать как быполярный без использования отводов от обмоток;
- С четирьмя обмотками - универсальный, подключив обмотки соответствующим образом можно использовать как быполярный или униполярный движок.

Рис. 9. Типы шаговых двигателей: биполярный, униполярный, с четырьмя обмотками.
Определить тип используемого двигателя можно, как правило, по количеству выводов на его корпусе, а также не помешает прозвонить все выводы тестером для определения есть ли соеднения между обмотками.
L298 + шаговый двигатель + Raspberry Pi
Теперь давайте подключим шаговый двигатель, в моем случае применен биполярный мощный шаговый двигатель, извлеченный из старого матричного принтера.
Для подключения одного биполярного двигателя потребуется два выхода драйвера на L298 (два H-моста). Для данного эксперимента модуль L298 нужно подключить к Raspberry Pi так же, как и в варианте с .
Прежде можете поэкспериментировать без малинки - подавать поочередно на входы модуля L298 напряжение 5В и посмотреть как вал двигателя будет выполнять шаги.
По сути дела, при помощи малинки, мы будем поочередно и с некоторой задержкой подавать импульсы на обмотки движка, чем заставим его вал вращаться в нужную нам сторону и с нужной скоростью.

Рис. 10. Подключение биполярного шагового двигателя к модулю L298 для управления через Raspberry Pi.
Если все уже подключено, то переходим к экспериментам с простой тестовой программой на Python, которая поможет понять как работать с шаговыми двигателем используя L298 + Raspberry Pi.
Создадим файл для скрипта и откроем его для редактирования:
Nano /home/pi/l298_stepper_motor_test.py
Вставляем в редактор следующий код скрипта на Python:
#!/usr/bin/env python # -*- coding: utf-8 -*- import time import RPi.GPIO as GPIO # Подготавливаем пины GPIO. GPIO.cleanup() GPIO.setmode(GPIO.BCM) GPIO.setup(4, GPIO.OUT) GPIO.output(4, GPIO.LOW) GPIO.setup(17, GPIO.OUT) GPIO.output(17, GPIO.LOW) GPIO.setup(27, GPIO.OUT) GPIO.output(27, GPIO.LOW) GPIO.setup(22, GPIO.OUT) GPIO.output(22, GPIO.LOW) # Временная задержка между шагами, сек. step_timeout = 0.0105 # Длительность импульса, сек. impulse_timeout = 0.008 # Шаг 1. GPIO.output(4, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(4, GPIO.LOW) time.sleep(step_timeout) # Шаг 2. GPIO.output(17, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(17, GPIO.LOW) time.sleep(step_timeout) # Шаг 3. GPIO.output(27, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(27, GPIO.LOW) time.sleep(step_timeout) # Шаг 4. GPIO.output(22, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(22, GPIO.LOW) time.sleep(step_timeout) # Ждем 10 секунд. time.sleep(10) # 20 раз по 4 шага в цикле. for i in range(0,20): GPIO.output(4, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(4, GPIO.LOW) time.sleep(step_timeout) GPIO.output(17, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(17, GPIO.LOW) time.sleep(step_timeout) GPIO.output(27, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(27, GPIO.LOW) time.sleep(step_timeout) GPIO.output(22, GPIO.HIGH) time.sleep(impulse_timeout) GPIO.output(22, GPIO.LOW) time.sleep(step_timeout)
Делаем файл со скриптом исполняемым и запускаем его на исполнение:
Chmod +x /home/pi/l298_stepper_motor_test.py /home/pi/l298_stepper_motor_test.py
осле запуска скрипта, шаговый двигатель должен совершить 4 шага (вращение в одну сторону), потом подождав 10 секунд он снова начнет свое вращение и сделает уже 20*4 шагов.
А теперь рассмотрим пример интерактивной программы, которая позволяет управлять направлением и скоростью вращения (последовательные шаги) шагового двигателя с использованием клавиатуры.
#!/usr/bin/env python # -*- coding: utf-8 -*- import os import sys import curses import time import RPi.GPIO as GPIO # Функция для подготовки пинов GPIO def setup(*ports): GPIO.cleanup() # Режим именования пинов по названию, а не по номеру на плате GPIO.setmode(GPIO.BCM) for port in ports: # Установка пина на вывод + низкий уровень "0" GPIO.setup(port, GPIO.OUT) GPIO.output(port, GPIO.LOW) # Функция для подачи импульса на пин с некоторой задержкой (1 шаг) def impulse(port=0): GPIO.output(port, GPIO.HIGH) # Set the timeout value to be anough for one step time.sleep(0.008) GPIO.output(port, GPIO.LOW) time.sleep(timeout) # Выполняем установку нужных нам пинов GPIO setup(4, 17, 27, 22) # Задержка между шагами (по умолчанию) timeout = 0.0105 # Направление вращения (по умолчанию) direction = "r" # Инициализация экрана (модуль curses) stdscr = curses.initscr() # Реагировать на нажатие клавиш без подтверждения при помощи ENTER curses.cbreak() # Разрешить использование стрелочек на клавиатуре stdscr.keypad(1) # Не блокировать программу по времени при опросе событий stdscr.nodelay(1) # Отобразим на экране данные по умолчанию stdscr.addstr(0, 10, "Hit "q" to quit") stdscr.addstr(2, 10, "--->") stdscr.addstr(3, 10, "Timeout: " + str(timeout)) stdscr.refresh() # Главный цикл while True: # Набор импульсов для вращения вала мотора вправо if direction == "r": impulse(4) impulse(17) impulse(27) impulse(22) # Набор импульсов для вращения вала мотора влево elif direction == "l": impulse(22) impulse(27) impulse(17) impulse(4) # Считываем код нажатия клавиши и проверяем его key = stdscr.getch() if key != -1: # Клавиша "влево" меняет направление вращения: ВЛЕВО if key == curses.KEY_LEFT: # отображаем текст "<---" в позиции экрана 2, 10 stdscr.addstr(2, 10, "<---") # Изменим значение переменной с направлением вращения direction = "l" # Клавиша "вправо" меняет направление вращения: ВПРАВО elif key == curses.KEY_RIGHT: stdscr.addstr(2, 10, "--->") direction = "r" # Клавиша "вверх" ускоряет вращение elif key == curses.KEY_UP: # Уменьшаем задержку между шагами timeout = timeout - 0.0005 # Клавиша "вниз" замедляет вращение elif key == curses.KEY_DOWN: # Увеличиваем задержку между шагами timeout = timeout + 0.0005 # Клавиша "q" выполняет выход из программы elif key == ord("q"): stdscr.keypad(0) curses.echo() curses.endwin() os.system("clear") sys.exit() # Смотрим чтобы время задержки не перешло границу 0 if timeout <= 0: timeout = 0.0005 # Обновляем текст на экране stdscr.addstr(3, 10, "Timeout: " + str(timeout)) stdscr.refresh() time.sleep(0.01)
Теперь клацаем клавиши стрелок влево и вправо и смотрим как будет изменяться направление вращения вала двигателя, а при нажатии клавиш вверх и вниз скорость будет увеличиваться и уменьшаться соответственно.
Если же двигатель не вращается, то возможно что потребуется сменить полярность подключения одной из обмоток к модулю на L298.

Рис. 11. Программа управления биполярным шаговым двигателем, L298, Raspberry Pi.
Видео-демонстрация работы шагового двигателя:
Заключение
Надеюсь вы получили ответ на вопрос "что такое H-мост и как он работает", из экспериментов должно быть понятно как применять драйвер на микросхеме L298 и подключать к нему разные движки.
Важно заметить что в интернете можно найти готовые библиотеки и скрипты на Python для удобного управления двигателями при помощи H-моста на L298 с использованием Raspberry Pi.
При конструировании очередного станка с ЧПУ, а попросту 3-х осевого фрезерного-сверлильного станочка для печатных плат и мелких фрезерных работ, у меня появилось неугомонное желание разложить всё «по полочкам».
Многие скажут, что тема не нова, существует множество проектов, множество технических и программных решений. Но, плавая в этом море информации, я постарался убрать всю «воду» и получить «сухой остаток».
Вот что из этого получилось…
Задача построения станка обычно сводится к трем подзадачам - механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три.
Поскольку у нас журнал всё-таки практической электроники, начну с электроники и чуть-чуть с механики!
Привод
Нужно двигать собственно фрезер в 3-х направлениях - XYZ, значит нужно 3 привода - 3 мотора с передачей вращения вала двигателя в линейное перемещение.О передаче…
Для фрезерного станка, где есть боковые усилия резания материала, желательно не применять ременные передачи, очень популярные в 3D принтерах. Буду применять передачу «винт-гайка». Самая бюджетная передача - обычный стальной винт и безлюфтовая, желательно бронзовая, гайка. Более правильная - винт с трапециевидной резьбой и гайка из капролона. Самая хорошая (и, увы, самая дорогая) шарико-винтовая пара, или ШВП. Об этом подробнее я еще расскажу далее…
У каждой передачи есть свой коэффициент, свой шаг - то есть насколько линейно по оси переместится фрезер за один оборот двигателя, например, на 4 мм.
Двигатель (мотор)
В качестве двигателя для привода определил шаговый двигатель (ШД)Почему шаговый? Что это вообще такое?
Двигатели есть переменного и постоянного тока, коллекторные и бесколлекторные, и так называемые «шаговые». В любом случае нам надо обеспечить какую-то точность позиционирования, например 0,01 мм. Как это сделать? Если двигатель имеет прямой привод - вал двигателя соединяют напрямую с винтом, то для обеспечения такой точности нужно повернуть его на некоторый угол. В данном случае, при шаге передачи 4 мм и желаемой точности перемещения 0,01 мм это… всего 1/400 оборота, или 360/400=0,9 градуса! Ерунда, возьмем обычный моторчик…
С «обычным» моторчиком без обратной связи никак не получится. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор - потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Альтернатива - шаговый двигатель (как он работает, почитайте сами). Можно считать, что за одну «команду» он повернет свою ось на определенный градус, обычно это 1,8 или 0,9 градуса (точность обычно не хуже 5%) - как раз то, что нужно. Недостаток такого решения - при большой нагрузке двигатель будет пропускать команды - «шаги» и может вообще остановиться. Вопрос решается установкой заведомо мощного двигателя. На шаговых двигателях и делается большинство любительских станочков.
Выбираем шаговый двигатель
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом - то есть максимально мощный и экономичный двигатель.Противоречивые требования. Малый ток - значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент - это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:

Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STH38-1684
Драйвер шагового двигателя
Двигатель есть. Теперь нужен драйвер - переключать напряжение на обмотках двигателя определенным образом, при этом не превышая установленный ток.Самое простое решение - источник заданного тока и две пары транзисторных ключей на каждую обмотку. И четыре защитных диода. И логическая схема чтобы менять направление. И… Такое решение обычно делают на микросхеме ULN2003A для двигателей с малым током, имеет много недостатков, не буду на них останавливаться.
Альтернатива - специализированные микросхемы «всё в одном» - с логикой, транзисторами и диодами защиты внутри (или снаружи). А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
Что внутри микросхемы драйвера шагового двигателя? Блок логики и управления, источники питания, ШИМ со схемами формирования момента и времени коммутации обмоток, выходные ключи на полевых транзисторах, компараторы обратной связи - ток контролируется по падению напряжения на резисторах (Rs) в цепи питания обмоток. Ток двигателя задается опорным напряжением.
Для реализации этих функций существуют и другие схемные решения, например, с использованием микроконтроллеров PIC или ATMEGA (опять же с внешними транзисторами и защитными диодами). На мой взгляд, они не обладают значительным преимуществом перед «готовыми» микросхемами и я их в данном проекте использовать не буду.
Богатство выбора
На сегодняшний день есть достаточно много различных микросхем и достаточно много уже готовых плат и модулей драйверов ШД. Можно купить готовый, а можно «изобретать велосипед», тут каждый решает по-своему.
Из готовых - наиболее распространённые и недорогие драйверы на микросхемах Allegro A4988 (до 2А), Texas Instruments DRV8825 (до 2,5А).
Поскольку модули изначально разрабатывались для использования в 3D принтерах типа Rep-rap проекта Arduino, они не являются законченными модулями (например, им нужно еще питание логики (+5V), которое подается с так называемой рампы (Ramp).
Еще есть решения на DRV8811 (до 1,9 А), A3982 (до 2 А), A3977 (до 2,5 А), DRV8818 (до 2,5 А) DRV8825 (до 2,5 А), Toshiba TB6560 (до 3 А) и другие.
Поскольку мне интересно что-то сделать самому, плюс появилась возможность «попробовать на вкус» микросхемы Allegro A3982 и A3977, решил сделать пару драйверов самостоятельно.
Готовые решения на A4988 не понравились, прежде всего, из-за миниатюризации размеров печатной платы в ущерб хорошему охлаждению. Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор - получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения - в даташите нарисована плата гораздо больших размеров.
Провода мотора нужно сделать короткими, драйвер устанавливать рядом с двигателем. Существует 2 технических решения в звукотехнике: длинный сигнальный кабель к усилителю + короткие провода к акустической системе, или короткий сигнальный кабель к усилителю + длинные провода, а акустической системе. Оба решения имеют свои плюсы и минусы. С моторами - так же. Я выбрал длинные провода управления и короткие провода к мотору.
Управляющие сигналы - «шаг» (step), «направление» (dir), «включение» (enable), индикация состояния сигналов управления. Некоторые схемы не используют сигнал «Enable», но это приводит в режиме простоя к ненужному нагреву и микросхемы и двигателя.
Одно питание 12-24 вольта, источник питания логики (+5B) - на плате. Размеры платы - достаточные для хорошего охлаждения, двухсторонняя печать с большой областью «меди», возможность приклеить на микросхему радиатор (применяемой для охлаждения памяти видеокарт).
Драйвер ШД на микросхеме Allegro A3982

Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 Ом
Драйвер ШД на микросхеме Allegro A3977
Основные характеристики и блок-схема:
Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2,5 А Типовое сопротивление открытых транзисторов (при токе 2,5А): 0,33+0,45 Ом
Схема и прототип


Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.
Печатная плата
Процесс изготовления - ЛУТ, двухсторонняя. Габариты 37×37 мм, крепеж - как у двигателей, 31×31 мм.
Для сравнения - слева мое творчество, справа драйвер на A4988.
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
- Обеспечивает вращение в прямом и реверсивном направлениях.
- Задание режимов, параметров, управление контроллером осуществляется двумя кнопками и сигналом ВКЛ (включение).
- При выключении питания все режимы и параметры сохраняются в энергонезависимой памяти контроллера и не требуют переустановки при включении.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать , про дайверы .
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.

Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки "+" и "–" (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер (транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
Я спаял контроллер на макетной плате размерами 45 x 20 мм.

Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно .
Управление контроллером достаточно простое.
- При активном сигнале "ВКЛ" (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе (сигнал ВКЛ активен) кнопки "+" и "–" меняют скорость вращения.
- Каждое нажатие на кнопку "+" увеличивает скорость на минимальную дискретность.
- Нажатие кнопки "–" - уменьшает скорость.
- При удержании кнопок "+" или "–" скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- При остановленном двигателе (сигнал ВКЛ не активен).
- Нажатие кнопки "+" задает режим вращения в прямом направлении.
- Нажатие кнопки "–" переводит контроллер в режим реверсивного вращения.
- Для выбора режима – полношаговый или полушаговый необходимо при подаче питания на контроллер удерживать кнопку "–" в нажатом состоянии. Режим управления двигателем будет изменен на другой (проинвертирован). Достаточно выдержать кнопку – нажатой в течение 0,5 сек.
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.

Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.

Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.

Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить .
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).
То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть .
Схема контроллера с биполярным драйвером L298N выглядит так.

Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
Схема подключения биполярного шагового двигателя с 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
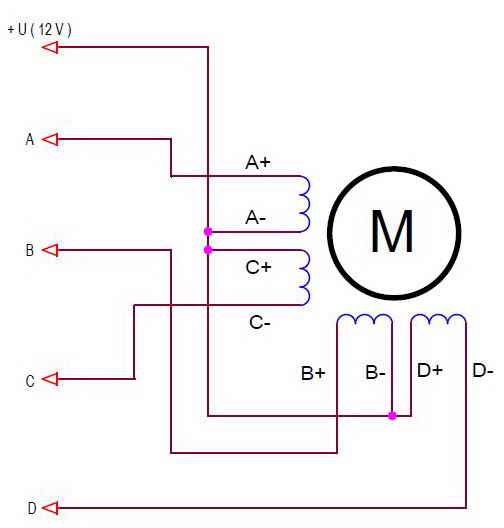
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.

Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.

Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
- максимальный ток драйвера;
- максимальное напряжение драйвера;
- скорость вращения двигателя.
Программное обеспечение (прошивка) для PIC12F629 можно загрузить .


